自律飛行制御WG
研究リーダー
東京大学 大学院工学研究科 教授
土屋 武司 /
三井不動産 イノベーション推進本部
産学連携推進部 統括 藤塚 和弘

2024年秋、物流施設「MFLP・LOGIFRONT東京板橋」内に、都心型のドローンフィールドが生まれます。この施設の整備に取り組むのが、三井不動産・藤塚らと、航空工学を専門とする東京大学・土屋教授。GPSの届かない環境下での飛行システムや、複数のドローンが利用できるドローンポートの実装を通して、人とドローンの共存を推し進めます。
三井不動産
イノベーション推進本部
産学連携推進部
東京大学
大学院工学系研究科

MFLP・LOGIFRONT東京板橋のイメージ(竣工は2024年9月末を予定)

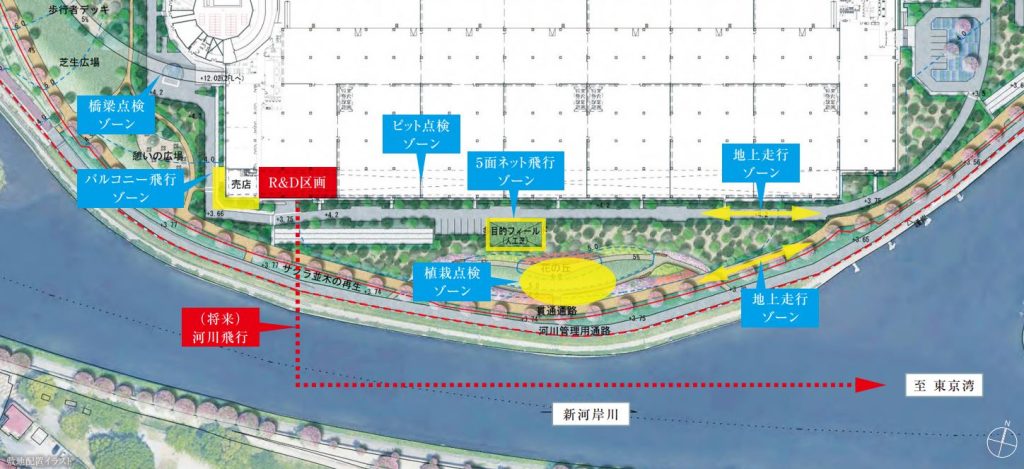
「MFLP・LOGIFRONT東京板橋」におけるドローン関連の敷地配置イメージ(計画段階)

